Linear Nonlocal Prior Term
Due to the heavy computational load of the nonlinear nonlocal prior energy, we propose another possible solution to separate the interactions of two directions, i.e. to increase the range of the interaction along one side of a network branch (in our case, a road), but keep the magnitude of the interaction unchanged. To this end, we construct a linear nonlocal prior energy, an Euclidean invariant HOAC prior, to replace the nonlinear nonlocal prior energy. It compares the normal vector of each pixel to the vector joining the two interacting points. It encourages nearly aligned normal vectors of two pixels inside the longer range along a nearly straight side to align; while the repulsion between two pixels on opposite sides of a network branch is small. As a result, when the new term is added to the model, the width of the network branches is controlled largely by the short range, while the distance over which the branch will be straight is controlled largely by the long range. Experiments (Fig. 6) show this linear nonlocal prior term has equivalent effects to the nonlinear nonlocal prior term. Its advantage, compared to the latter, is that it is more efficient from a computational point of view, due to the linearity.
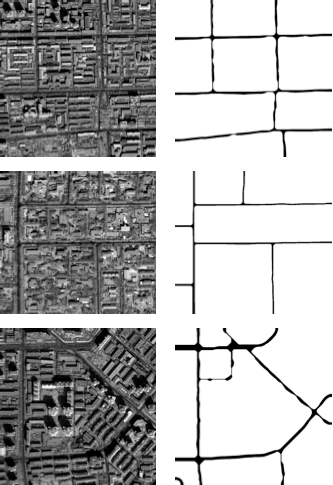
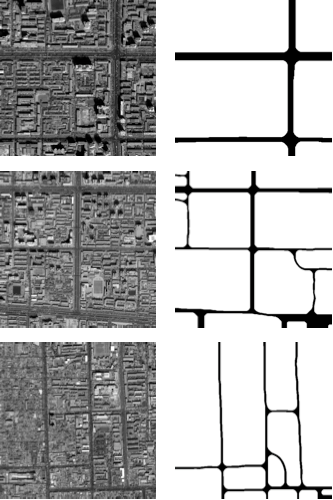
Fig. 6 Experiments using the linear
nonlocal prior term, to extract the road network of similar
width. Left column: input images; right column: extraction
results.
However, if the new term in
the model is largely weighted, the repulsion across a
network branch will become significant, and begin to
dominate the width of the network branches. We analyze the
stability of the new model, and find that in addition to
separating two interactions, the new model permits the
modelling of two widths simultaneously. In this case, the
prior model has two local minima corresponding to the
ranges of the two interactions. A preliminary test was done
on an image at reduced resolution containing two roads,
with one road about three times wider than the other. The
results obtained using the model with and without the
linear nonlocal prior term are illustrated in Figs. 7(b)
and 7(c). This comparison shows clearly that adding the new
energy term enables the detection of roads with both
widths, while the previous model finds only an incomplete
network.
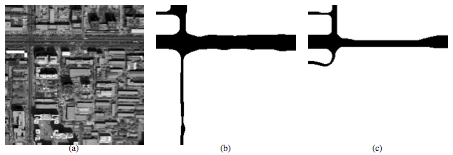
Fig. 7 Experiments at 1/4 resolution, to
extract the road network of different widths. From left to
right: image data; corresponding results obtained using the
model with and without the linear nonlocal prior term.
Last update: Dec. 10, 2008